Guide Cap Project
1. Background & Intro
Personally speaking, I have not paid any attention to such a device until I noticed a product made by an Estonian Company, 7Senses.
This SuperBrain is intriguing and revolutionary, according to their opinion. In my own opinion, the information density of haptic feeling is far greater than that of hearing or other senses. Some groups focus on “Taking to the” device, which is difficult to use in some noisy environments. NUS2024 SWS3025 AIoT Intelligent White Cane
However, the price of SuperBarin is too high for common people to afford. So, I decided to design a cheaper version
2. How I made it

At the very beginning, I used an AI painting program to render a structure of the cap to meet the requirements. After that, I made a list of components required.
| Name of Components | Number |
|---|---|
| 5V, 2000mAh battery | 2 |
| ESP32S3 Development Board | 2 |
| Vibration Motor | 7 |
| Laser Radar | 1 |
| Cane | 1 |
The table above lists the main components I used. Other minor components (e.g., MOSFETs, soldering tools) are omitted for brevity
The general principle is that the Radar, which is fixed on the cane, will detect the obstacles in the surroundings and give the data back to the cap through Bluetooth Low Energy (BLE). The ESP32 board will control the motors inside the cap to vibrate. The intensity of vibration represents the distance between the user and the obstacle. PWM controls the motor vibration intensity by modulating the power supply frequency.
Based on the design above, I start my job from the cap first: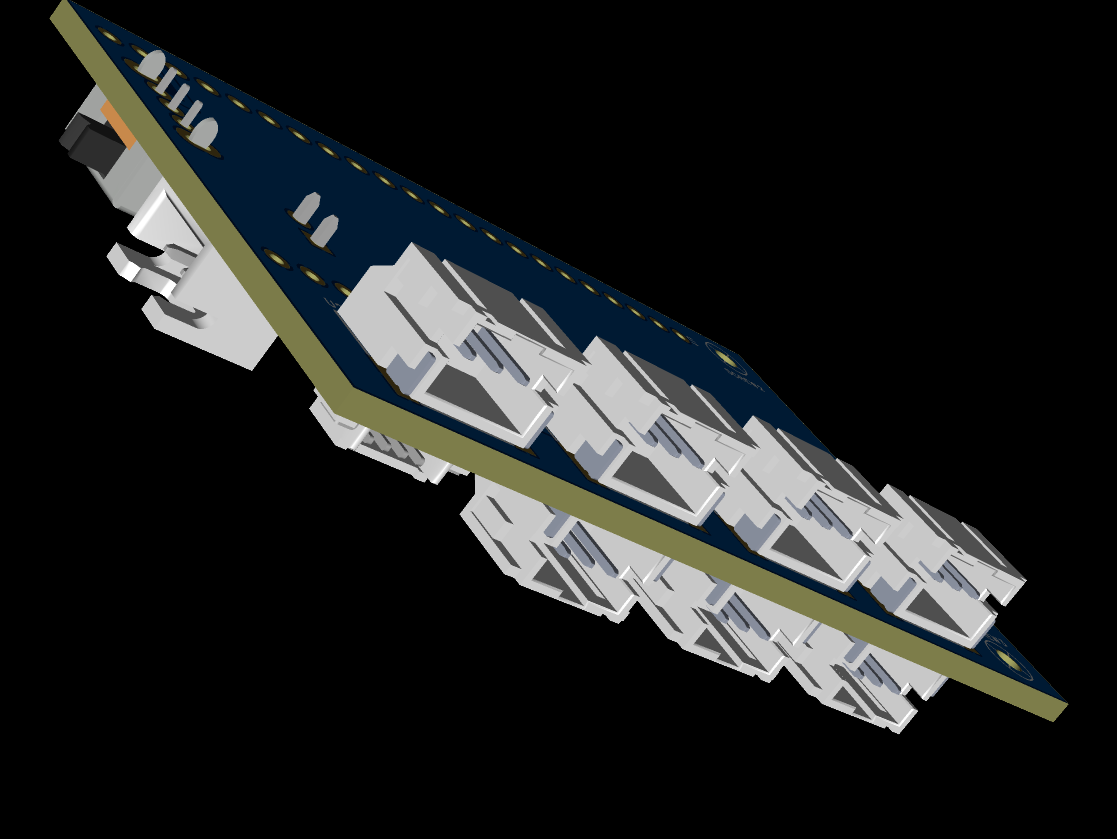
First of all, I designed an extension board to allow the ESP32 and the motors to communicate. There are 7 interfaces on the board that connect to 7 motors. The 7 motors correspond to 7 directions on the cap.
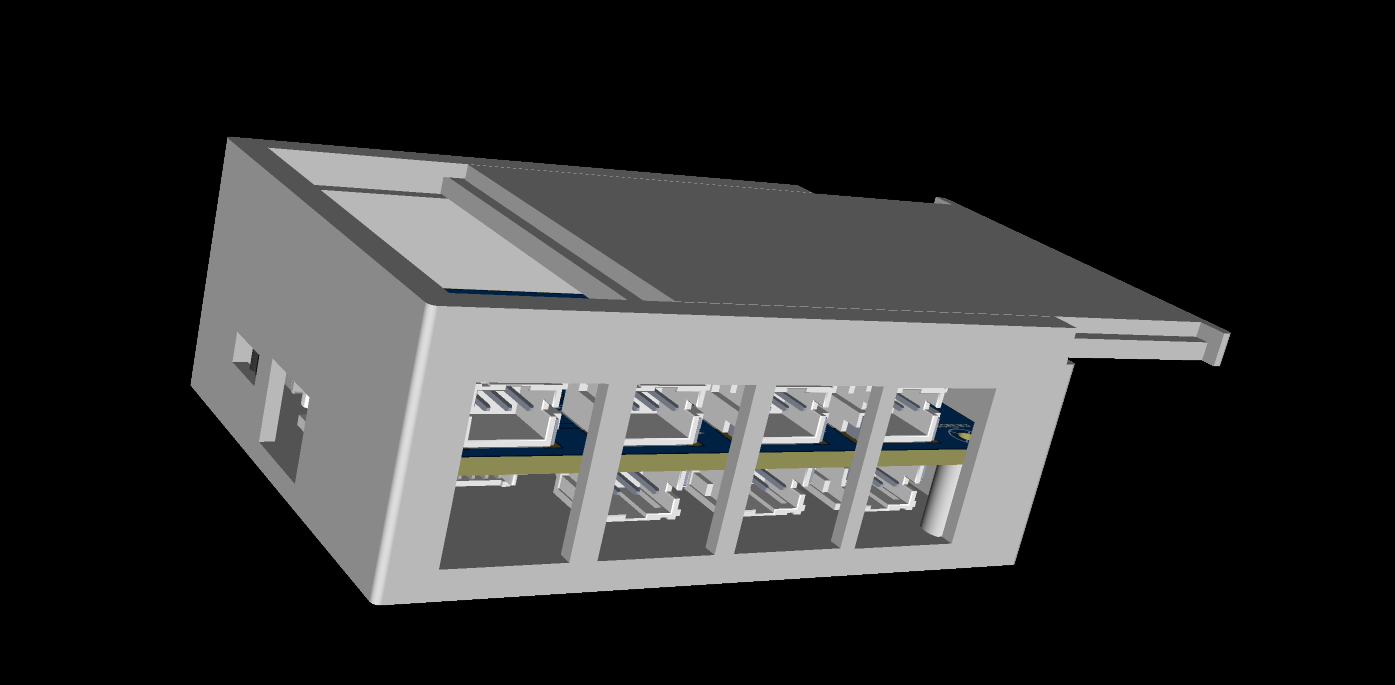
Second, I modelled a container to put the devices in. After that, I printed these things out.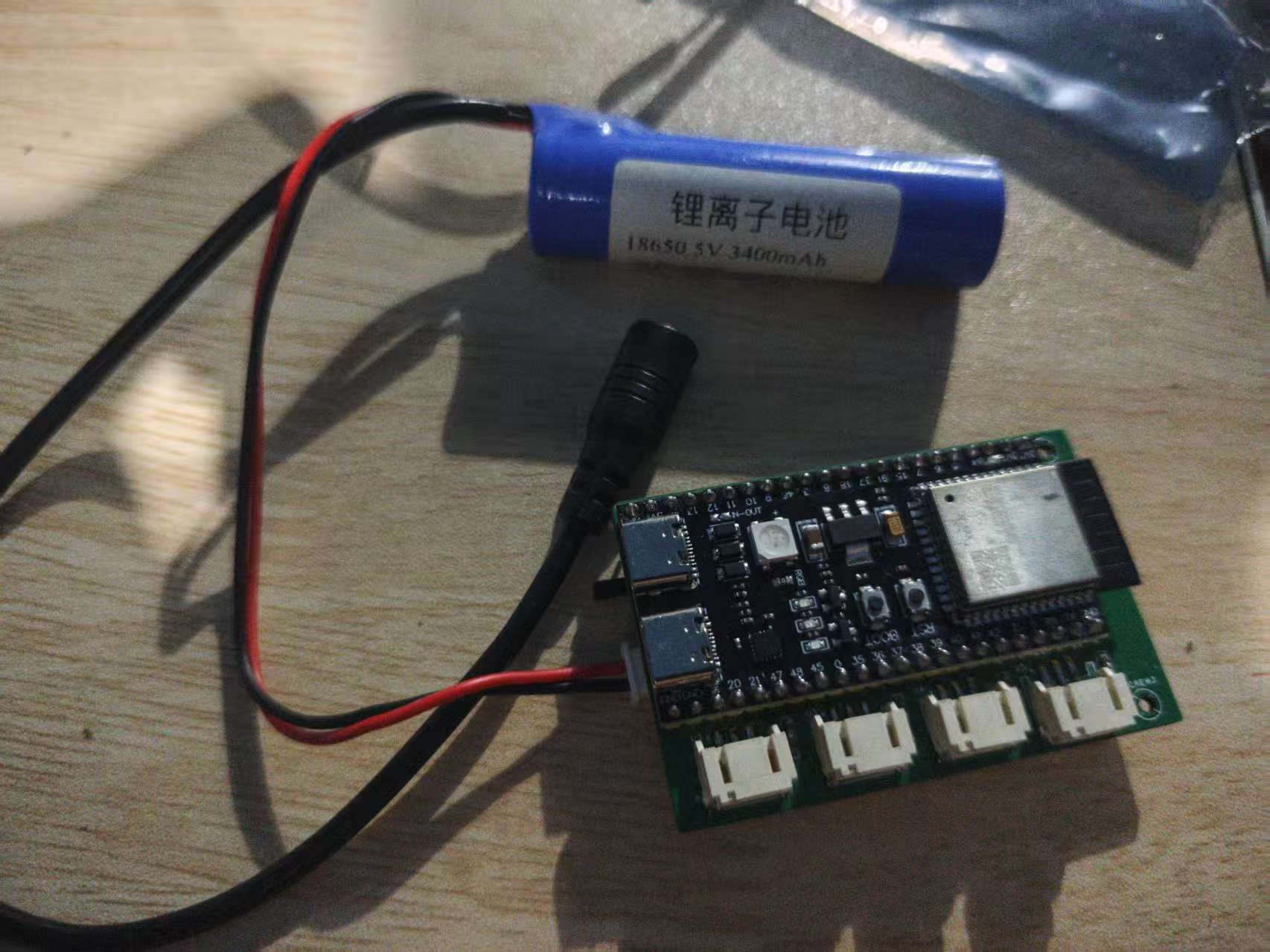


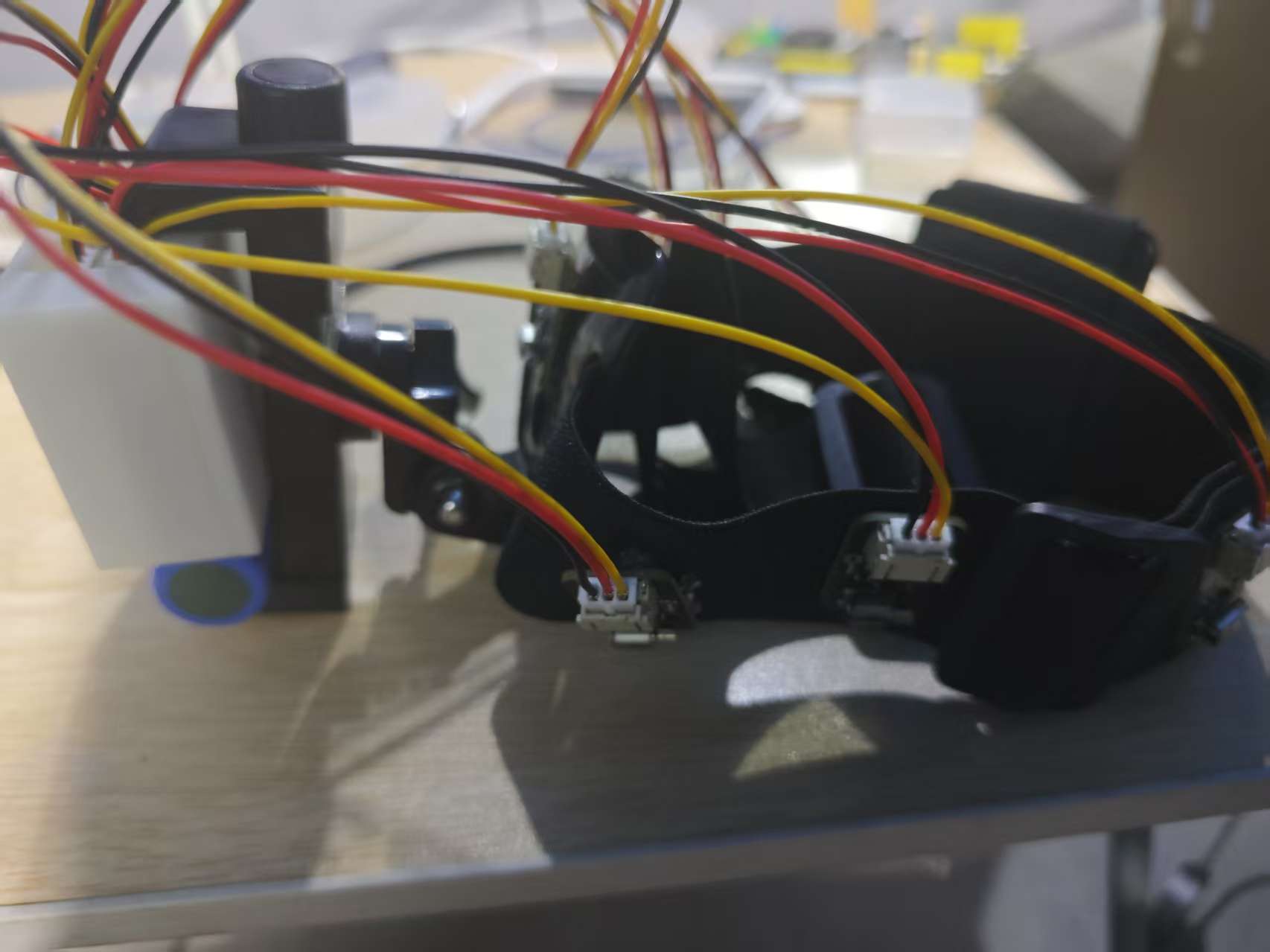
The cap is modified from a head mount for a camera. The vacant place for the action camera is used to fix the battery and the box of the mainboard. The motors connected by wires will be stuck on the head mount.

The cane design is as follows. Similarly, the radar will be installed on the cane, at the height of the knees. The radar module will rotate so that it can detect obstacles in all directions. Then the output will be sent to another ESP32 to be processed and transferred to the cap.
The mounting arm is a part of a selfie stick; however, I found that the size is unbelievably suitable for my invention.

Now, all the hardware is ready. It is time for coding.
The logic sequence of the code is simple. When the cap and the cane start working, they will keep seeking each other. Once they connect, the cane will start to send data packets
I will keep the code, models, and boards open-source in my GitHub account.
3. Results & Summary
when building the whole device together, several components were damaged during assembly. Although I consider these things, the total price is about 1200 CNY, which is much less than the price of 9000 EURO. My project may be rough; however, I still believe that there are some methods to lower the price without lowering the quality.
Advantage
Low error: according to my measurement, the error is about
cm High range: In some conditions, the radar can even detect objects 9.7m away
Better user experience: vibrations can make users feel the surroundings.
Disadvantage
Large weight: The cap is much heavier. Difficult to wear for a long time
High power consumption: The battery needs to be charged frequently.